WEDGEWARD-HO!
Botbash 30lb
Botbash 30lb
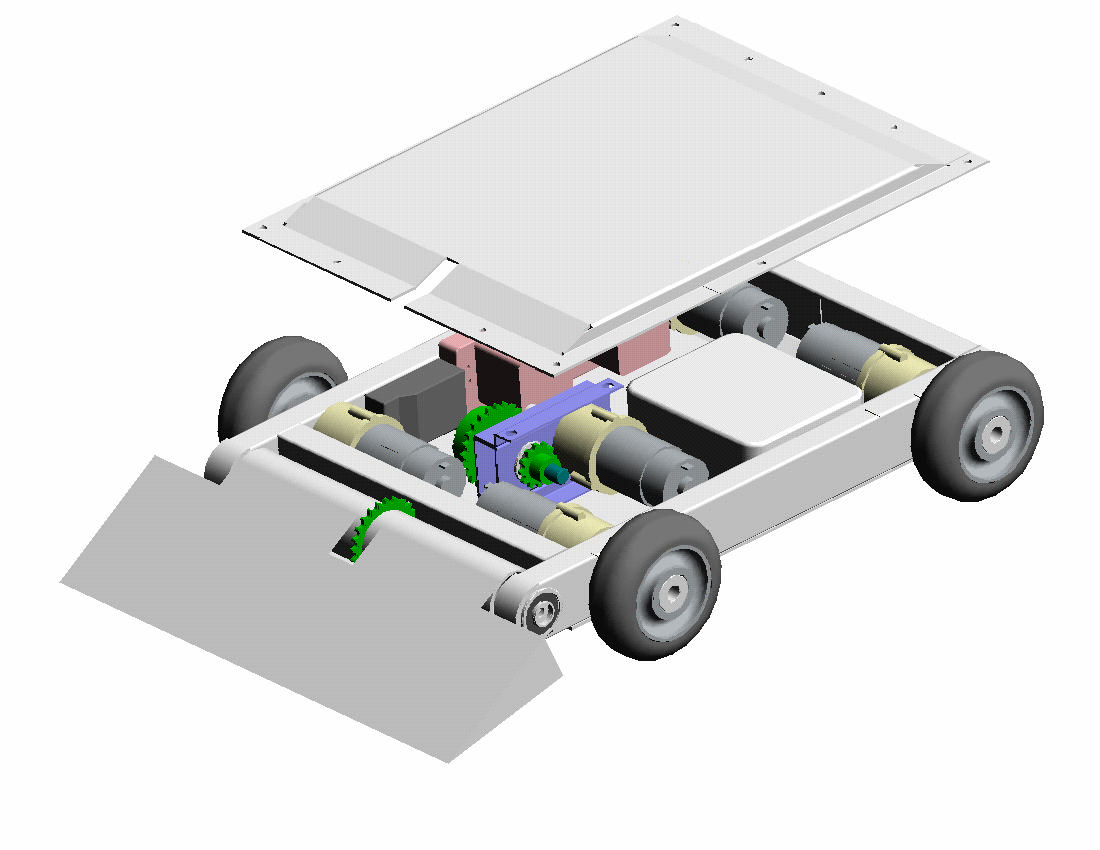
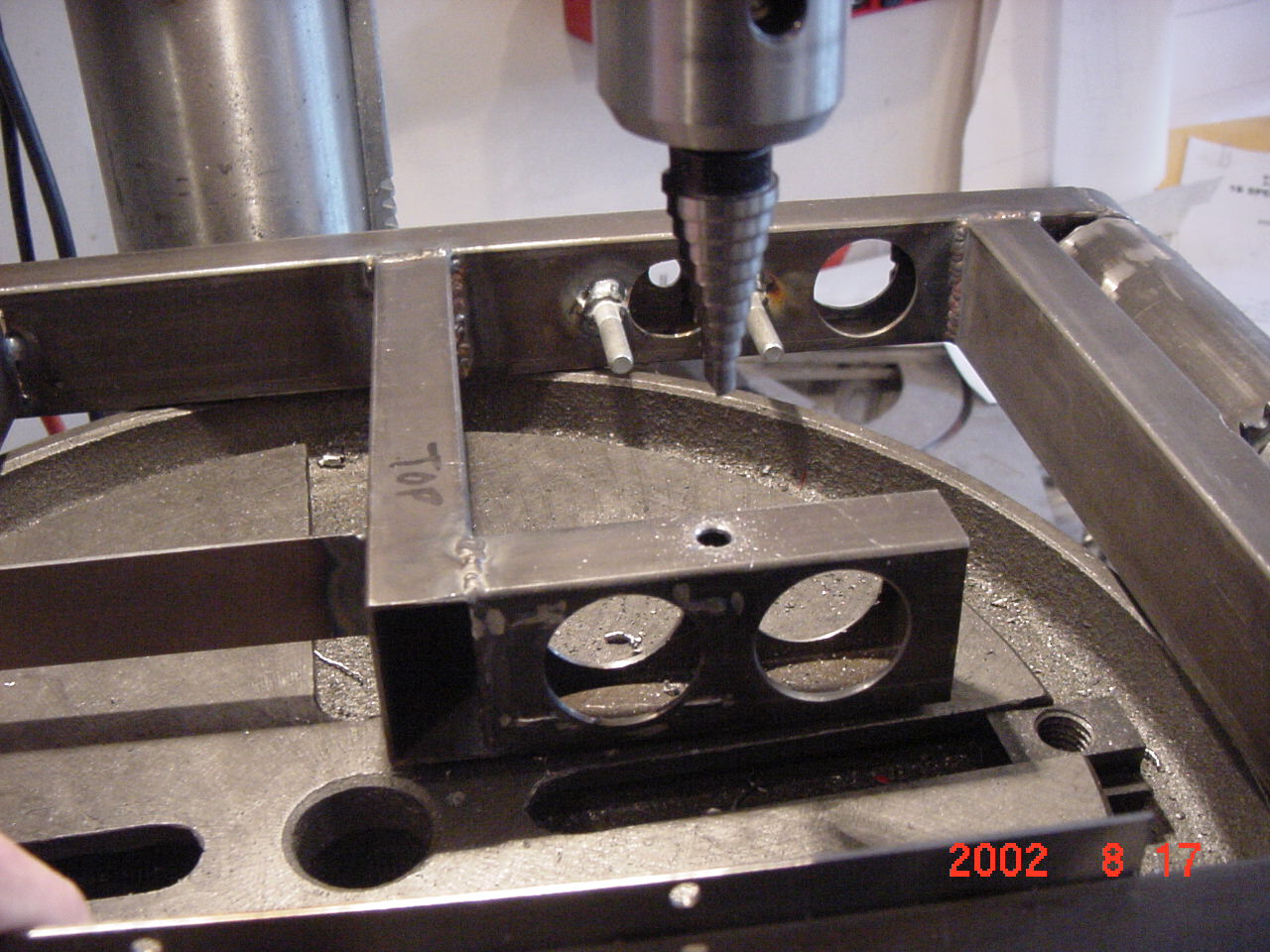
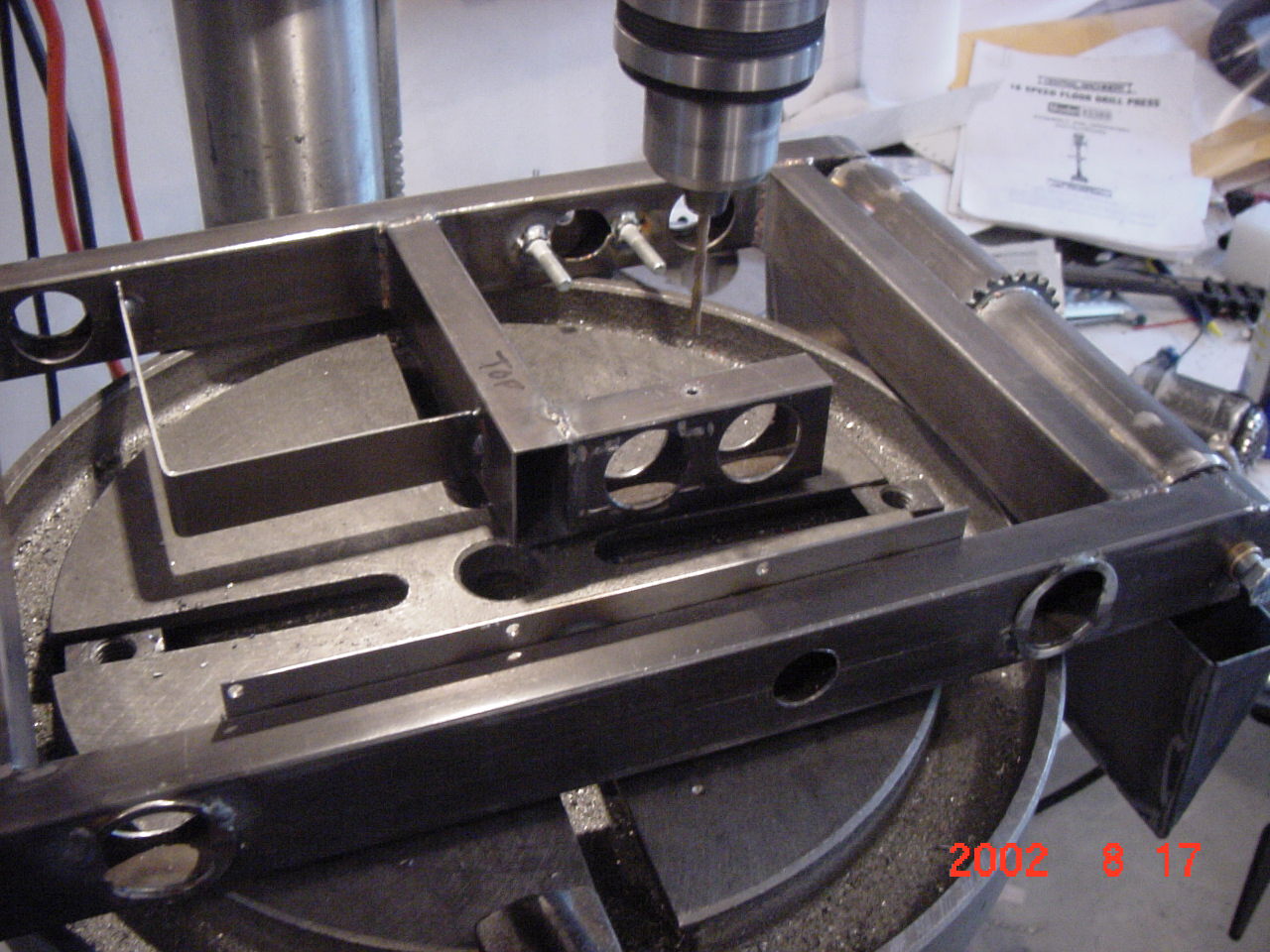
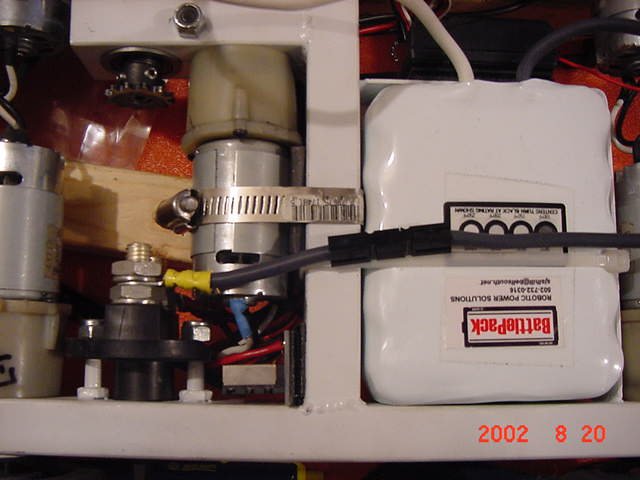
The chassis is .049 wall 4130 chromolly steel tubing. The covers are made of 5052-H32 Aluminum. Three IFI Victor 883's are used as speed controllers, running at 24V provided by the Battlepack from Steve Hill. I originally was going to use a Team Delta RCE225 to control the wedge, but it moved too fast, which would be difficult to position the wedge flush with the floor during combat. I'm using the Team delta mondo switch and 24V to 5V converter. The receiver is a Hitec 75 Mhz FM 8 channel unit.
I'd like to thank Ted Zeiger for his assitance in the drill motors and for providing the wheels. I'd especially like to Tyler Nicely for making the wheel hubs that press into the Colson wheels and thread onto the drill motors. Great job Tyler!
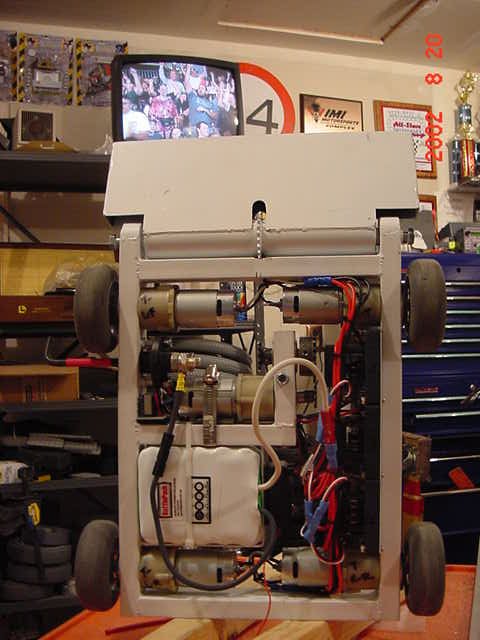
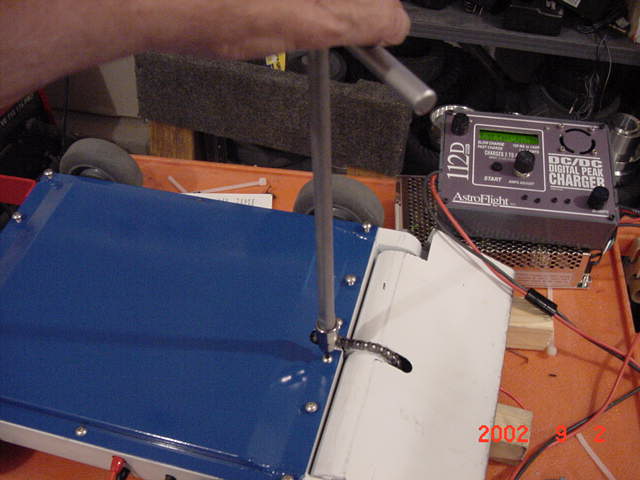
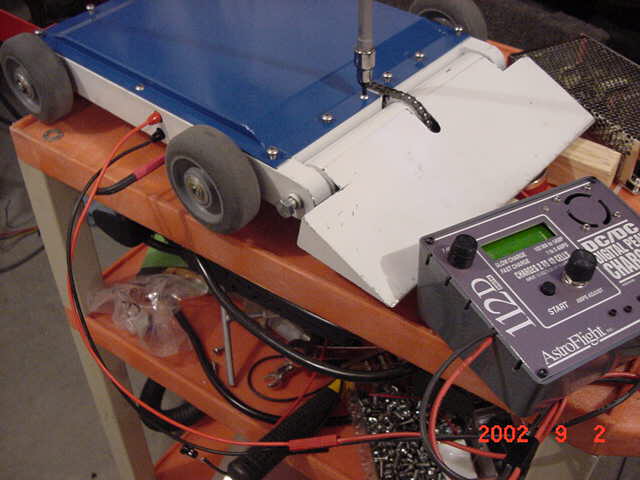
I spent a weekend designing this bot then start building it on 8-7-2002. On the evening of 8-20, I had it running around my driveway. I've got a few bugs to work out, as the lifter is too sensitive, even with the Victor 883 controlling it. I need to back off on the voltage or increase the travel on the joystick... something, anyway! I've already burnt up one motor forcing it into a continuous locked stall. If anyone has any ideas, please email me!



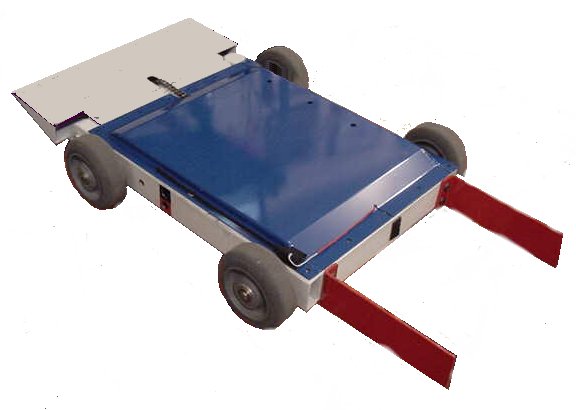
Wedgeward-Ho! now has a pair of extensions which will facilitate ball and cone handling at Botbash. It is now completed, along with charging jacks and my favorite colors, Red White and Blue!